Sensing at the Edges
A standalone companion page for an ALIFE 2026 submission on uniform contractile soft bodies, trainable artificial chemistries, and body-mediated edge sensitivity.
Overview
Sensing at the Edges asks how a multicellular body can coordinate adaptive behaviour before any cell has specialized into a sensor or effector. The project takes the skin brain thesis and animal sensorimotor organization hypothesis as an artificial-life question: what becomes possible when generic contractile, sensitive, communicative cells are coupled into one body and selected on whole-organism behaviour?
The synthetic specimens are fixed 7 x 2 contractile soft bodies. Every cell runs the same continuous-time recurrent neural network, embedded in a neural cellular automaton style update. The page frames that shared NCA-CTRNN rule as an influence-level trainable artificial chemistry: a coupled dynamical system whose effective intracellular influences are carved by selection, not a stoichiometric reaction network.
Research Question
The central issue is not whether a soft robot can locomote. Prior distributed-controller work already establishes that uniform local controllers can produce movement. The harder question here is whether the same pre-specialized substrate can produce behaviour conditional on what the body senses.
The task is a minimal cliff-versus-goal discrimination. A body begins on a plateau with a goal on one side and a cliff on the other. The terrain is mirrored, so a fixed unilateral commitment succeeds only at the 50% mirror-pair baseline. To do better, the specimen has to move, encounter an edge, reverse when that edge is a cliff, and then commit toward the goal.
Model
Each cell receives private deformation information from its own body and local signalling from its neighbours. No cell has a global coordinate, a privileged sensory label, or a dedicated motor role. Any functional differentiation has to arise from position, body boundary, coupling, deformation, terrain contact, and the shared dynamics of identical local rules.
Deformation is the mechanosensory route. Absolute deformation reports spring state relative to the birth configuration; compliance deformation reports spring state relative to the current actuation goal. Compliance is useful as a conditioned signal, but it is conceptually stronger than bare reafference because it compares the plant against the cell’s own command.
Task and Evolution
Evolution optimizes only controller parameters. The body is held fixed so the experiment isolates coordination rather than searching jointly over morphology and controller. Candidate chemistries are evaluated deterministically on six native terrains: three goal-cliff distance pairs, each mirrored left and right.
The fitness function is deliberately shaped. It rewards exploration toward the cliff side, reversal after meaningful wrong-side progress, approach to the goal, and goal contact, while penalizing falls. It is a constructive search instrument for finding possible coordination regimes, not a sparse model of natural selection.
Main Results
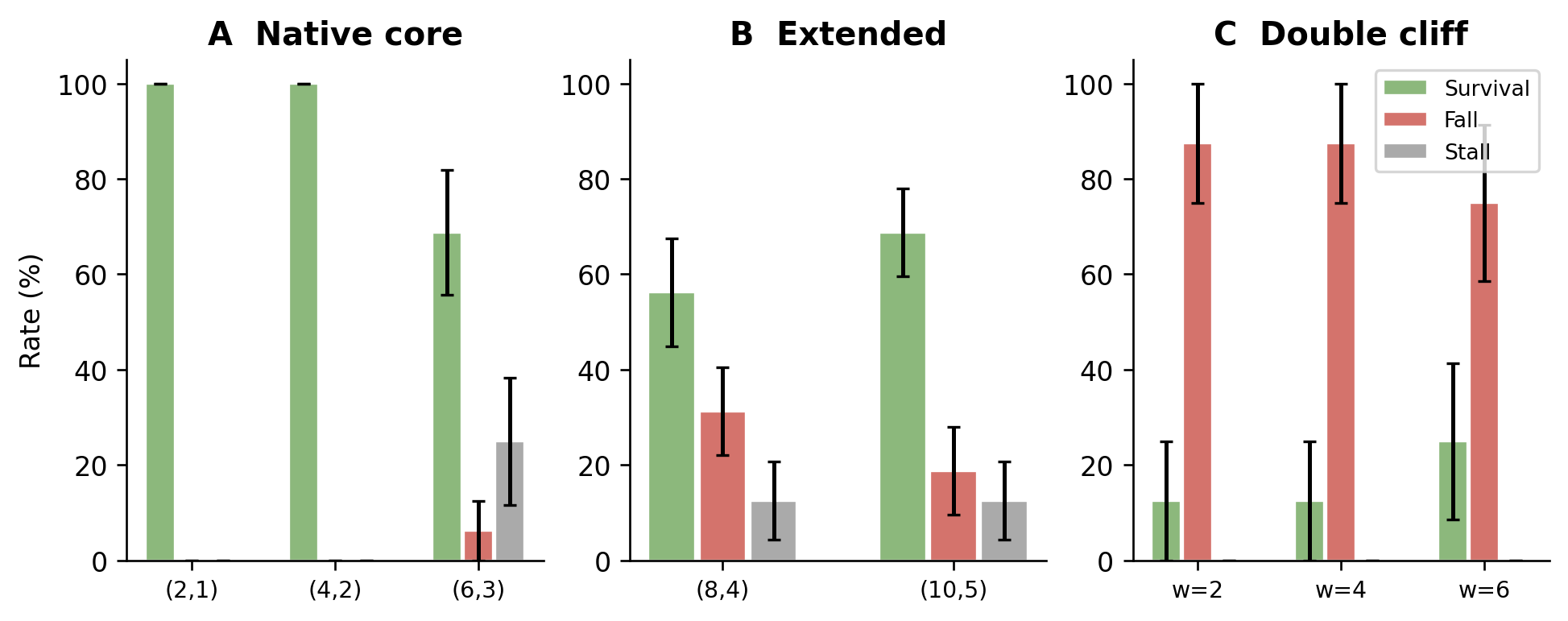
Across eight selected specimens, native performance was high: 43/48 successful episodes, or 89.6% +/- 12.4% SD across specimen-level rates. Performance was perfect on the two shorter native distance pairs and all failures occurred on the hardest native pair.
Generalization was narrower. On the two extended distance pairs, combined success was 20/32, or 62.5%, and excluding S4 it fell to 57.1%. Locomotion largely persisted, but the cliff-versus-goal discrimination tended to collapse toward the undirected commitment baseline.
| Assay | Endpoint | Reading |
|---|---|---|
| Native intact success | 43/48; 89.6% +/- 12.4% SD | Strong selected capacity on trained mirrored terrains. |
| Extended intact success | 20/32; 62.5% | Most specimens fall toward the 50% mirror-pair baseline on novel distances. |
| Double-cliff survival | 4/24 total survivals | Stress survival, not goal completion; S4 survives all three widths. |
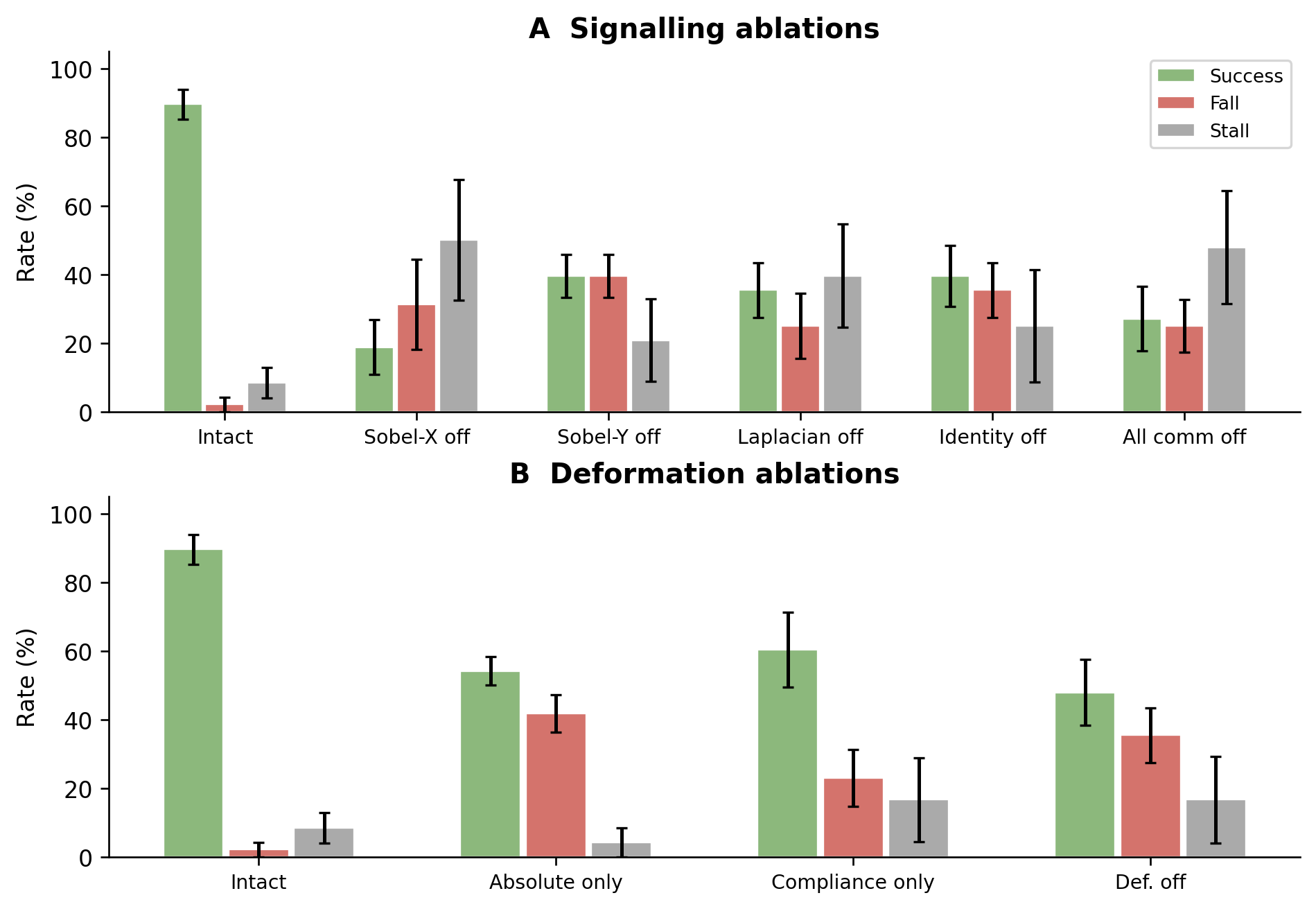
| Deformation off | 23/48; 47.9% success | Native success drops by 41.7 percentage points and falls rise sharply. |
| Sobel-x off | 9/48; 18.8% success | Largest single-filter signalling impairment. |
Ablations and Transfer
The perturbations separate locomotor drive, deformation-mediated modulation, and body calibration. Removing all deformation drops native success to 47.9% and raises falls sharply, which supports the interpretation that most specimens use deformation to make the cliff-versus-goal discrimination safe.
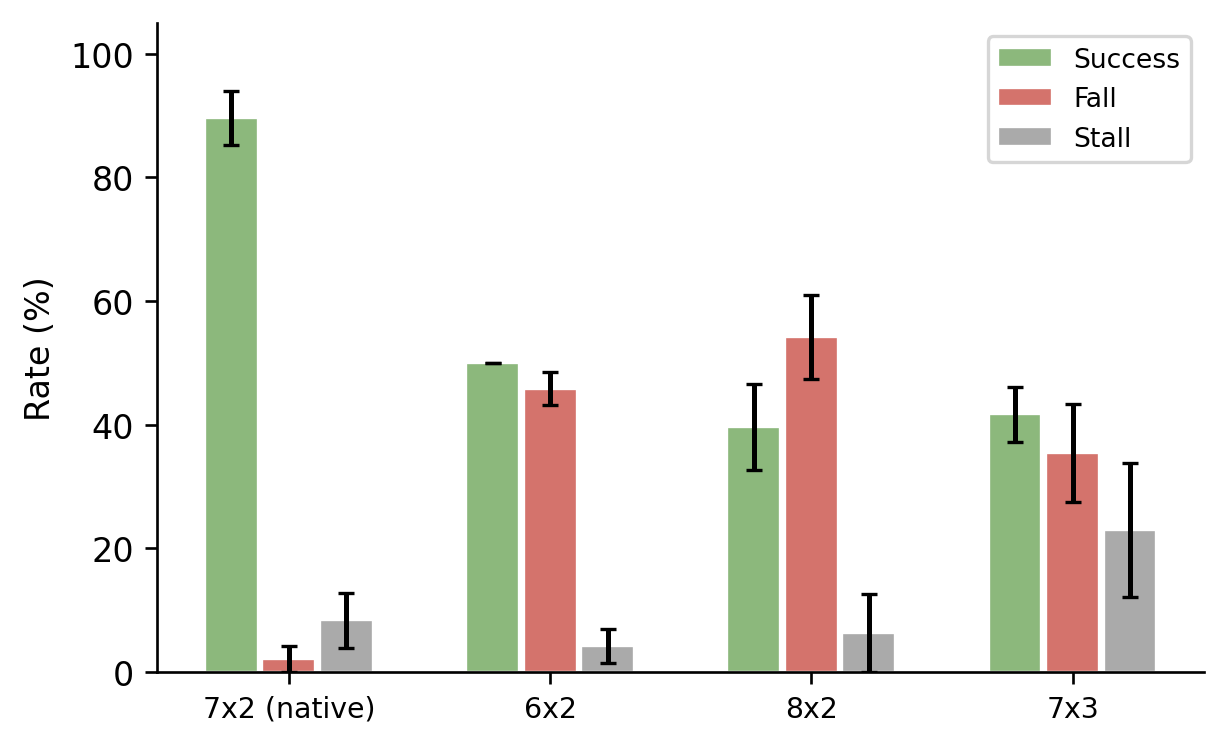
Signalling ablations impair coordination in distinct ways. Disabling Sobel-x gives the largest single-filter deficit, while disabling all communication tends to produce stalling rather than falling. Body transfer shows a different limit: altered bodies often still move, but the edge-sensitive discrimination collapses toward baseline. The chemistry is therefore calibrated to a body as a sensory interface, not merely a motor output device.
S4 Mechanism
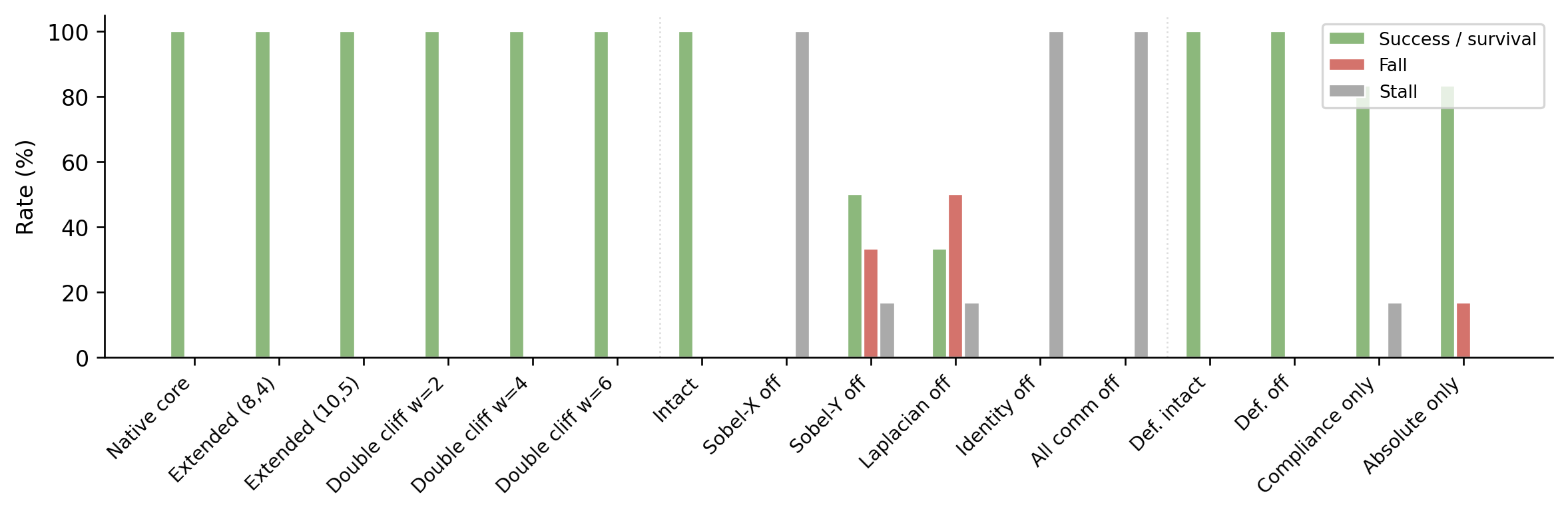
S4 is the limiting case. It entered the cohort as an ordinary archive elite, selected before any ablation, but later proved exceptional: it remains perfect on native and extended terrains, survives all double-cliff widths, and preserves native success when deformation is removed.
The mechanism battery supports a narrow claim. S4 reverses at the cliff with no sensory route to the cliff through deformation. Its controller continues an open-loop rhythm whose hidden and commanded action streams do not encode the future direction, while the body streams shift after support loss and carry the return.
| S4 assay | Endpoint | Interpretation |
|---|---|---|
| Native intact | 6/6 success | Baseline native-task robustness. |
| Extended intact | 4/4 success | Distance generalization in the selected analysis. |
| Double-cliff intact | 3/3 survival | Robustness on the no-goal stress endpoint. |
| Native deformation off | 6/6 success | Cliff reversal persists without deformation input. |
| Sobel-x off | 0/6 success | Collapse when a load-bearing signalling filter is disabled. |
| All communication off | 0/6 success | Intercellular signalling sustains the locomotor drive. |
Animations
These traces make the contrast concrete: native success, native deformation-off success, double-cliff survival, and collapse under a load-bearing signalling ablation.
Signal and Body State
In the fixed-width deformation-off sweep, controller streams and body streams are exactly identical across inspected pre-release prefixes. After support loss, body and spring streams carry release-locked direction information, while matched hidden/action controller streams remain flat. This is an informational dissociation, not by itself a proof of causality.
Model Specification
This section holds the implementation details that a reader needs to rebuild the system or audit the reported assays. The paper can remain shorter because exact parameterization, scoring, search, and assay catalogues live here.
Morphology and Physics
| Item | Value |
|---|---|
| Body | Fixed 7x2 rectangle, 14 identical contractile cells. |
| Actuation | Independent horizontal and vertical rest-length multipliers. |
| Multiplier band | [0.5, 1.5], centered on reference length. |
| Spring-stiffness scale | 0.8, close to the Evolution Gym soft-cell setting. |
| Integrator | Fourth-order Runge-Kutta, 15 physics substeps per environment step. |
| Episode length | 3000 environment steps. |
CTRNN-NCA Parameterization
| Block | Shape or value | Count |
|---|---|---|
| Input weights | 30 -> 12 | 360 |
| Recurrent weights | 12 -> 12 | 144 |
| Readout weights | 12 -> 8 | 96 |
| Hidden biases | 12 | 12 |
| Time-constant parameters | 12 learned values mapped to [1.0, 10.0] | 12 |
| Total | Shared by every cell | 624 |
Perception and Outputs
| Channel group | Details |
|---|---|
| Private inputs | 4 signed deformation deltas plus 2 action-feedback channels. |
| Deformation | Absolute L/L_init - 1 and compliance L/L_rest - 1 on horizontal and vertical axes. |
| Signed-log gains | alpha = 10 for absolute deformation; alpha = 85 for compliance deformation. |
| Communication | 6 signalling channels read through the 3x3 neighbourhood. |
| Spatial filters | Sobel-x, Sobel-y, Laplacian, and identity with zero-padded SAME convolution over the body mask. |
| Output | 2 action channels plus 6 signalling updates from the post-update hidden state. |
Task Definitions
| Item | Value |
|---|---|
| Native terrain | 12-cell plateau flanked by one goal block and one cliff. |
| Distance pairs | (2,1), (4,2), and (6,3), mirrored across left and right sides. |
| Baseline | A fixed one-direction commitment succeeds on 50% of mirrored pairs. |
| Success | Any body point contacts the goal without death-plane contact. |
| Fall | Death-plane contact. |
| Stall | Neither goal hit nor fall by the step limit. |
Fitness
| Term | Meaning |
|---|---|
| Score | s = 10w + 20 rho gamma(w) + 30a + 40g - 20f. |
| w | Normalized wrong-side, cliff-side exploration progress. |
| rho | Reversal progress after meaningful wrong-side exploration. |
| a | Approach to the goal frontier. |
| g | Goal contact. |
| f | Fall penalty. |
| gamma(w) | clip((w - 0.5) / 0.2, 0, 1). |
| Candidate bonus | 20 per mirrored pair solved. |
Search
| Item | Value |
|---|---|
| Emitter | Separable CMA-ES through evosax. |
| Framework | CMA-MAE over a MAP-Elites archive. |
| Emitters and population | 8 emitters, 25 candidates each, 200 evaluations per generation. |
| Archive descriptors | Goal-hit count, fall count, and completion time. |
| Archive grid | 7 x 7 x 20. |
| Generations per run | 100. |
| Initial sigma | 1.0. |
Assays
| Assay | Configuration |
|---|---|
| Native core | 6 episodes per specimen: 3 distance pairs x 2 sides. |
| Extended distances | (8,4) and (10,5), mirrored. |
| Double-cliff survival | Symmetric cliffs of widths 2, 4, and 6, with no goal. |
| Deformation ablations | Intact, absolute-only, compliance-only, and deformation-off. |
| Signalling ablations | Disable Sobel-x, Sobel-y, Laplacian, identity, or all communication. |
| Body transfer | Zero-shot evaluation on 6x2, 8x2, and 7x3 bodies. |
S4 Supplementary Analyses
The S4 supplement is built around one canonical packet, one identity premise, three converging analyses, and one negative result. The goal is to document why S4 is reported as an existence proof of body-performed, controller-blind edge sensitivity while keeping the claim bounded to a single post-hoc case study.
Canonical Packet
| Field | Value |
|---|---|
| Specimen | bin_03_rank_00_cell_6-0-3_flat_0423. |
| Source run | paper_run_cliff_rect_7x2_sep_cmaes_g150_p300_15sub_t4000_e4000_ref003_seed137_e4fcc2fb, generation 99. |
| Canonical condition | Fixed-width deformation-off sweep, signalling intact. |
| Goal | Right side, distance 12, held constant. |
| Cliff distances | 1 through 30. |
| Grid width / plateau | 72 / 12, held constant. |
| Traces | 30/30, with no missing or duplicate distances. |
Pre-release Identity
In the fixed-width family, only the cliff distance changes. Before the release event, every inspected controller and body stream is exactly identical across compared prefixes: 435/435 steps for hidden signalling, CTRNN state, controller action, body positions, velocities, corners, spring state, and drive streams.
Delayed Physical Return
| Quantity | Value |
|---|---|
| Events | 30. |
| Goal successes | 28/30. |
| Returned from edge | 30/30. |
| Falls | 0/30. |
| Away by +128 / +336 | 3/30 / 21/30. |
| First sustained away movement | 30/30; median 219 steps post-release, range 88-575. |
Forced-command Control
Replaying the recorded deformation-off command streams on a long supported terrain, with the controller bypassed and support preserved, rarely produces a release-like return. This argues against a pure internal command-clock explanation and makes support loss central to the observed return.
| Measure | Forced support-preserved replay | Matched real cliff |
|---|---|---|
| Replayed traces | 30/30 | - |
| Support-loss events | 0 | Release occurs. |
| Pseudo-reversals / real reversals by +336 | 2/30 | 21/30. |
| Away-direction windows by +336 | 5/30 | 21/30. |
| Mean post-release displacement | -0.049 | 0.118. |
Path-ensemble Analysis
The path-ensemble analysis is maximum-caliber-inspired, not formal stochastic thermodynamic Maximum Caliber. It asks which coarse stream constraints improve held-out prediction of post-release away-flux. It does not maximize path entropy and does not provide a causal proof.
| Stream constraint | Delta log-loss | 95% bootstrap CI | Away-flux error |
|---|---|---|---|
| Hidden signalling | -0.006 | [-0.010, -0.002] | 0.039 |
| Controller action | -0.007 | [-0.009, -0.004] | 0.041 |
| Contractile springs | 0.017 | [0.003, 0.029] | 0.031 |
| Current springs | 0.018 | [0.004, 0.031] | 0.032 |
| Body kinematic | 0.007 | [-0.003, 0.015] | 0.034 |
| Combined body | 0.020 | [0.004, 0.033] | 0.032 |
Direction Decoders
| Stream | Max mean phase slip | Mean PC-L2 delta | Best AUC | Significant rows |
|---|---|---|---|---|
| signal_hidden | 0.000 | 0.000 | 0.500 | 0/84 |
| controller_action | 0.000 | 0.000 | 0.500 | 0/84 |
| spring_contractile | 0.195 | 0.751 | 1.000 | 27/84 |
| spring_current | 0.207 | 0.361 | 1.000 | 26/84 |
| body_kinematic | 0.688 | 1.155 | 1.000 | 20/84 |
| body_no_contractile | 0.466 | 1.060 | 1.000 | 19/84 |
Negative Result
Onset regressions do not support a clean travelling mechanical wave from the edge. The supported claim is release-locked perturbation in body and spring streams, with a coherent body-wide change rather than a rank-ordered wave propagating from the cliff-facing edge.
Availability
The companion page is structured so that the paper, model specification, S4 supplement, animations, checkpoints, traces, and code archive can be linked from one stable place. Internal sections are available now; external repository and packet links should be added only after the released artifacts have stable URLs or DOIs.
| Artifact | Status |
|---|---|
| Project overview | This page. |
| Model specification | Included above under Model Specification. |
| S4 supplement | Included above under S4 Supplementary Analyses. |
| Figures and animations | Served from public/projects/sensing-edges/. |
| JAX-EvoGym code | Awaiting stable repository or archive link. |
| Checkpoints, traces, packets, scripts | Awaiting stable archive links. |